
[Solved]Given Following Block Diagram Represents Control System Small Uav Q37141505
given the following block diagram which represents the controlsystem for a small UAV
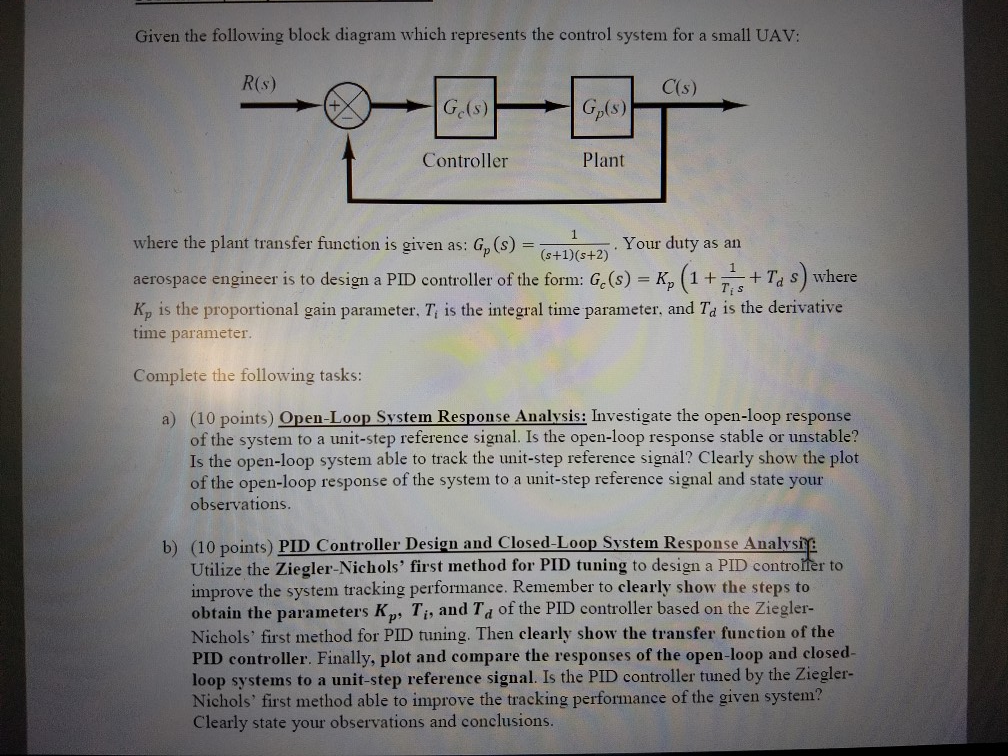
Given the following block diagram which represents the control system for a small UAV R(s) C(s) Gp(s) Controller Plant where the plant transfer function is given as: Gp (s)-(s+1)(s+2) . Your duty as an acrospace engineer is to design a PID controller of the form: G,(s) – K, (1++ Ta s) where Ti s Kp is the proportional gain parameter. T, is the integral time parameter, and Ta is the derivative time parameter. Complete the following tasks: a) (10 points) Open Loop Sysfen Response Analysist Investigate the open-loop response of the system to a unit-step reference signal. Is the open-loop response stable or unstable? Is the open-loop system able to track the unit-step reference signal? Clearly show the plot of the open-loop response of the system to a unit-step reference signal and state your observations b) (10 points) PID Controller Design and Closed Loop System Response Analys Utilize the Ziegler-Nichols’ first method for PID tuning to design a PID controlfer to improve the system tracking performance. Remember to clearly show the steps to obtain the parameters Kp, Ti, and Ta of the PID controller based on the Ziegler- Nichols’ first method for PID tuning. Then clearly show the transfer function of the PID controller. Finally, plot and compare the responses of the open-loop and closed. loop systems to a unit-step reference signal. Is the PID controller tuned by the Ziegler- Nichols’ first method able to improve the tracking performance of the given system? Clearly state your observations and conclusions. Show transcribed image text Given the following block diagram which represents the control system for a small UAV R(s) C(s) Gp(s) Controller Plant where the plant transfer function is given as: Gp (s)-(s+1)(s+2) . Your duty as an acrospace engineer is to design a PID controller of the form: G,(s) – K, (1++ Ta s) where Ti s Kp is the proportional gain parameter. T, is the integral time parameter, and Ta is the derivative time parameter. Complete the following tasks: a) (10 points) Open Loop Sysfen Response Analysist Investigate the open-loop response of the system to a unit-step reference signal. Is the open-loop response stable or unstable? Is the open-loop system able to track the unit-step reference signal? Clearly show the plot of the open-loop response of the system to a unit-step reference signal and state your observations b) (10 points) PID Controller Design and Closed Loop System Response Analys Utilize the Ziegler-Nichols’ first method for PID tuning to design a PID controlfer to improve the system tracking performance. Remember to clearly show the steps to obtain the parameters Kp, Ti, and Ta of the PID controller based on the Ziegler- Nichols’ first method for PID tuning. Then clearly show the transfer function of the PID controller. Finally, plot and compare the responses of the open-loop and closed. loop systems to a unit-step reference signal. Is the PID controller tuned by the Ziegler- Nichols’ first method able to improve the tracking performance of the given system? Clearly state your observations and conclusions.
Expert Answer
Answer to given the following block diagram which represents the control system for a small UAV… . . .
OR
