
[Solved] Large Collection Mobile Wireless Devices Naturally Form Network Devices Nodes Two Devices Q37170228
Shortest Path Algorithm 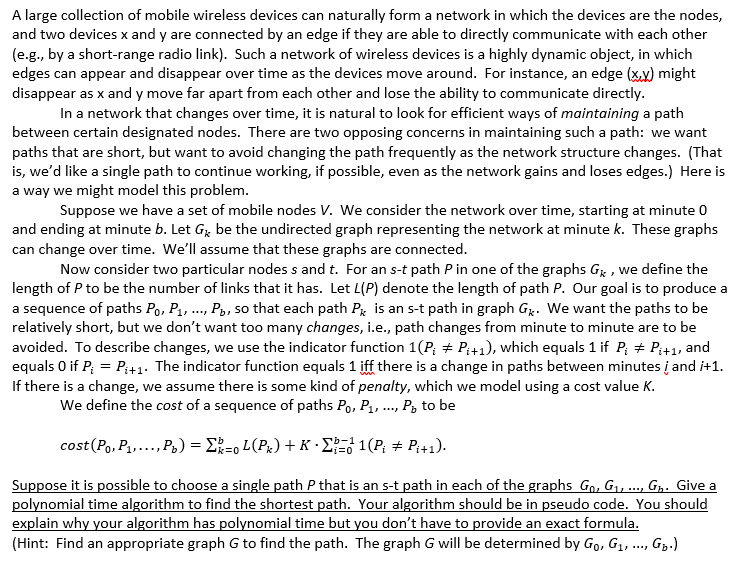
A large collection of mobile wireless devices can naturally form a network in which the devices are the nodes and two devices x and y are connected by an edge if they are able to directly communicate with each other (e.g., by a short-range radio link). Such a network of wireless devices is a highly dynamic object, in which edges can appear and disappear over time as the devices move around. For instance, an edge (x,y) might disappear as x and y move far apart from each other and lose the ability to communicate directly In a network that changes over time, it is natural to look for efficient ways of maintaining a path between certain designated nodes. There are two opposing concerns in maintaining such a path: we want paths that are short, but want to avoid changing the path frequently as the network structure changes. (That is, we’d like a single path to continue working, if possible, even as the network gains and loses edges.) Here is a way we might model this problem Suppose we have a set of mobile nodes V. We consider the network over time, starting at minute 0 and ending at minute b. Let G be the undirected graph representing the network at minute k. These graphs can change over time. We’ll assume that these graphs are connected Now consider two particular nodes s and t. For an s-t path P in one of the graphs Gk, we define the length of P to be the number of links that it has. Let L(P) denote the length of path P. Our goal is to produce a a sequence of paths Po, P1, , Рь, so that each path Pk is an s-t path in graph Gk, we want the paths to be relatively short, but we don’t want too many changes, i.e., path changes from minute to minute are to be avoided. To describe changes, we use the indicator function 1(BヂPi+1), which equals 1 if PヂP+1, and equals o if P = Pi+1. The indicator function equals 1 iff there is a change in paths between minutes, and i+1 If there is a change, we assume there is some kind of penalty, which we model using a cost value K We define the cost of a sequence of paths Po, P1, …, P to be Suppose it is possible to choose a single path P that is an s-t path in each of the graphs Go, G G. Give a olvnomial time algorithm to find the shortest path. Your algorithm should be in pseudo code. You should explain why your algorithm has polvnomial time but you don’t have to provide an exact formula (Hint: Find an appropriate graph G to find the path. The graph G will be determined by Go, G1,., Gb.) Show transcribed image text A large collection of mobile wireless devices can naturally form a network in which the devices are the nodes and two devices x and y are connected by an edge if they are able to directly communicate with each other (e.g., by a short-range radio link). Such a network of wireless devices is a highly dynamic object, in which edges can appear and disappear over time as the devices move around. For instance, an edge (x,y) might disappear as x and y move far apart from each other and lose the ability to communicate directly In a network that changes over time, it is natural to look for efficient ways of maintaining a path between certain designated nodes. There are two opposing concerns in maintaining such a path: we want paths that are short, but want to avoid changing the path frequently as the network structure changes. (That is, we’d like a single path to continue working, if possible, even as the network gains and loses edges.) Here is a way we might model this problem Suppose we have a set of mobile nodes V. We consider the network over time, starting at minute 0 and ending at minute b. Let G be the undirected graph representing the network at minute k. These graphs can change over time. We’ll assume that these graphs are connected Now consider two particular nodes s and t. For an s-t path P in one of the graphs Gk, we define the length of P to be the number of links that it has. Let L(P) denote the length of path P. Our goal is to produce a a sequence of paths Po, P1, , Рь, so that each path Pk is an s-t path in graph Gk, we want the paths to be relatively short, but we don’t want too many changes, i.e., path changes from minute to minute are to be avoided. To describe changes, we use the indicator function 1(BヂPi+1), which equals 1 if PヂP+1, and equals o if P = Pi+1. The indicator function equals 1 iff there is a change in paths between minutes, and i+1 If there is a change, we assume there is some kind of penalty, which we model using a cost value K We define the cost of a sequence of paths Po, P1, …, P to be Suppose it is possible to choose a single path P that is an s-t path in each of the graphs Go, G G. Give a olvnomial time algorithm to find the shortest path. Your algorithm should be in pseudo code. You should explain why your algorithm has polvnomial time but you don’t have to provide an exact formula (Hint: Find an appropriate graph G to find the path. The graph G will be determined by Go, G1,., Gb.)
Expert Answer
Answer to A large collection of mobile wireless devices can naturally form a network in which the devices are the nodes and two de… . . .
OR
